| 基于深度强化学习的多无人机协同进攻作战智能规划 |
| |
| 作者姓名: | 李俊圣 岳龙飞 左家亮 俞利新 赵家乐 |
| |
| 作者单位: | 空军工程大学,空军工程大学,空军工程大学,空军工程大学,空军工程大学空管领航学院 |
| |
| 基金项目: | 国家自然科学基金(62106284),陕西省自然科学基金(2021JQ-370),军内科研项目(KJ20191A030153) |
| |
| 摘 要: | 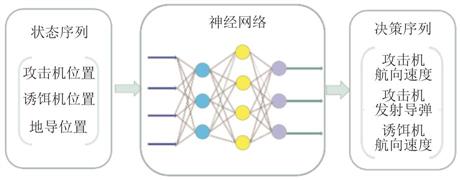
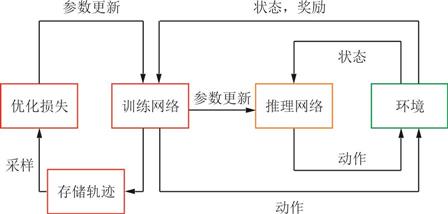
无人机依靠作战效费比高、灵活自主等优势逐步替代了有生力量作战,多无人机协同作战任务规划成为热点研究问题。针对传统任务规划采用的智能优化算法存在的依赖静态、低维的简单场景、机上计算较慢等不足,提出一种基于深度强化学习(DRL)的端到端的多无人机协同进攻智能规划方法。将压制敌防空作战(SEAD)任务规划过程建模为马尔科夫决策过程,建立基于近端策略优化(PPO)算法的SEAD 智能规划模型,通过两组实验验证智能规划模型的有效性和鲁棒性。结果表明:基于DRL 的智能规划方法可以实现快速、精细规划,适应未知、连续高维的环境态势,智能规划模型具有战术协同规划能力。
|
| 关 键 词: | 多无人机 深度学习 深度强化学习 PPO算法 泛化性 |
| 收稿时间: | 2022-01-13 |
| 修稿时间: | 2022-04-25 |
|
| 点击此处可从《航空工程进展》浏览原始摘要信息 |
|
点击此处可从《航空工程进展》下载免费的PDF全文 |
|