| 仿生四足六旋翼无人机自适应着陆性能分析 |
| |
| 作者姓名: | 周乐 尹乔之 魏小辉 孙文宇 梁伟华 聂宏 |
| |
| 作者单位: | 南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京航空航天大学 直升机动力学全国重点实验室,南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京航空航天大学 航空航天结构力学及控制全国重点实验室,南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京航空航天大学 飞行器先进设计技术国防重点学科实验室,南京航空航天大学 直升机动力学全国重点实验室 ,南京航空航天大学 飞行器先进设计技术国防重点学科实验室 |
| |
| 基金项目: | 国家自然科学基金(52275114),航空科学基金(202000410520002),中国博士后科学基金资助项目(2021M691565),南京航空航天大学前瞻布局科研专项资金资助,国防卓越青年基金(2018-JCJQ-ZQ-053),江苏高校优势学科建设工程资助项目 |
| |
| 摘 要: | 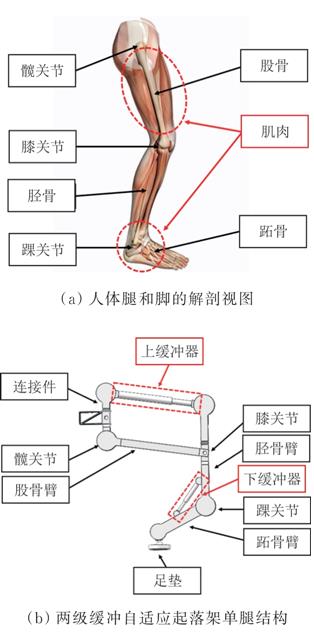
旋翼无人机在民用和军用领域被广泛应用,但传统撬式起落架在复杂地形下难以起降,为了扩大旋翼无人机的降落面积和应用范围,设计一种仿人腿式两级缓冲自适应起落架。通过对仿生腿的正逆运动学分析,提出一种自适应起落架姿态调整策略;建立仿生四足六旋翼无人机着陆动力学模型,基于多体动力学软件sim?center 3D 开展了着陆动力学仿真,并与传统撬式起落架进行着陆性能对比研究。结果表明:着陆腿式的两级缓冲自适应起落架及其姿态调整策略,能够使滚转角减小95.69%,过载系数降低34.06%,两级缓冲自适应起落架在面对复杂地形时具备主动调节姿态安全着陆的地形适应能力和极好的减震缓冲能力。

|
| 关 键 词: | 旋翼无人机 仿生着陆腿 自适应起落架 着陆动力学 仿真 |
| 收稿时间: | 2023-04-03 |
| 修稿时间: | 2023-05-04 |
|
| 点击此处可从《航空工程进展》浏览原始摘要信息 |
|
点击此处可从《航空工程进展》下载免费的PDF全文 |
|