|
|||||
|
|
| 基于串级线性自抗扰的四旋翼姿态控制方法 | |
| 作者姓名: | 常哲 陈鹏云 李佳成 石上瑶 |
| 作者单位: | 1.中北大学航空宇航学院 太原 030051;2.中北大学软件学院 太原 030051 |
| 基金项目: | 国家自然科学基金(51909245,62003314);山西省重点研发计划(202202020101001);2022年中北大学科技立项资助项目(20221876) |
| 摘 要: | 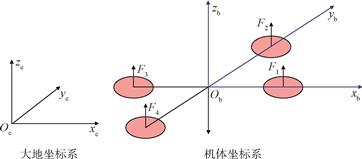 针对四旋翼无人机姿态调整过程中,由于参数不确定性及外界环境干扰,往往给姿态控制带来一定困难。本文研究提出一种基于串级线性自抗扰的四旋翼姿态控制方法。首先建立四旋翼无人机的动力学姿态模型,提出采用串级PID双环路控制架构,将姿态控制任务分解为内外两个环路。 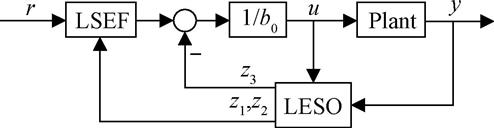 采用Levant微分器提取控制参量,以强化跟踪能力。此外,对原线性自抗扰控制器进行优化,旨在更好地消除外界随机扰动对系统的影响。利用MATLAB Simulink环境对提出的控制方法进行模拟,结果表明相比传统方法,该方法能更好地抑制系统受扰动引起的影响,增强系统对期望信号的跟踪能力,从而明显提高了四旋翼无人机姿态调整的精度与稳定性,以及四旋翼无人机姿态控制的精度和鲁棒性。 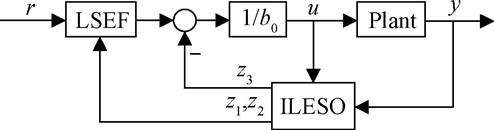 |
| 关 键 词: | 四旋翼无人机 线性自抗扰控制 串级PID控制 Levant微分器 |
| 收稿时间: | 2023-10-06 |
| 修稿时间: | 2023-12-28 |
| 点击此处可从《遥测遥控》浏览原始摘要信息 | |
| 点击此处可从《遥测遥控》下载免费的PDF全文 | |