| 空间机械臂操作子系统设计与实现 |
| |
| 引用本文: | 邱新安, 马动涛, 田立成, 胡玉茜, 吴志红, 曾政菻, 魏志明, 段福伟, 肖强, 马洪炯, 施维. 空间机械臂操作子系统设计与实现[J]. 空间科学学报, 2024, 44(5): 939-947. doi: 10.11728/cjss2024.05.2023-0081 |
| |
| 作者姓名: | 邱新安 马动涛 田立成 胡玉茜 吴志红 曾政菻 魏志明 段福伟 肖强 马洪炯 施维 |
| |
| 作者单位: | 1.兰州空间技术物理研究所 兰州 730000;;2.北京空间飞行器总体设计部 北京 100094 |
| |
| 摘 要: | 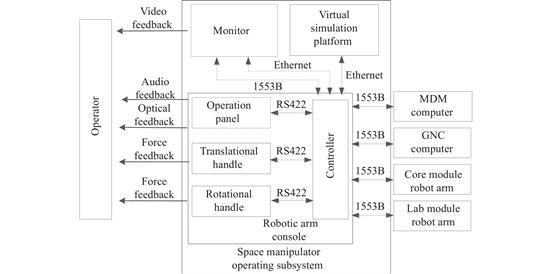
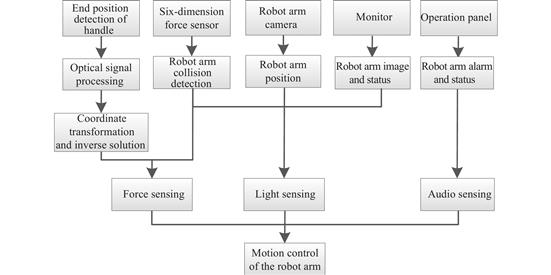
空间机械臂作为中国空间站建设和在轨运营的重要平台, 具有自由度多、转动惯量大、操作精度高、模式多样等特点. 针对空间机械臂在轨任务特点, 建立了支持长期在轨、多模式工作的空间机械臂操作子系统. 该操作子系统由机械臂操作台、虚拟仿真平台、显示器等构成, 可满足多任务需求.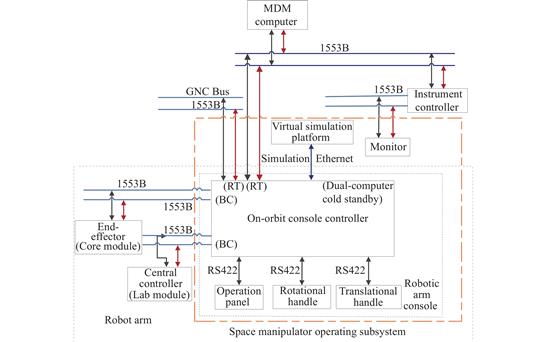
通过对操作子系统的架构、工作模式、技术特点的分析, 重点研究了操作子系统的多总线体系结构、多模态人机交互技术、力觉渲染算法, 并根据地面验证和在轨试验, 给出了空间机械臂操作子系统的验证情况. 结果表明, 空间机械臂操作子系统可有效模拟在轨任务, 准确完成对机械臂的控制与精细操作, 为支撑空间机械臂任务实施积累了经验和数据.
|
| 关 键 词: | 空间机械臂 操作子系统 机械臂操作台 人机交互 力觉渲染 |
| 收稿时间: | 2023-08-07 |
| 修稿时间: | 2024-01-26 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《空间科学学报》浏览原始摘要信息 |
|
点击此处可从《空间科学学报》下载全文 |
|